

SLAM100 เป็นสแกนเนอร์ Lidar แบบมือถือ Handheld ในโลกที่มีราคาต่ำกว่าล้านที่มีเจ้าตลาดไม่กี่เจ้าที่ขาย ปฏิวัติวงการเลเซอร์สแกนจากที่ต้องใช้ขาตั้งกล้องสแกนเป็นจุดๆ เป็นมือถือสแกน จากสแกนเป็นวันๆ เหลือเป็นสแกนไม่กี่นาที นอกจะ SLAM100 ราคาค่อนข้างถูกว่าคู่แข่งแล้ว การใช้งานก็ค่อนข้างง่าย เป็นมิตร บทความนี้จะลองเอามาใชังานจริง ทดลอง และ สแกนให้เห็นการนำไปใช้ ทางผู้เขียนหวังว่าจะเป็นประโยชน์ไม่มากก็น้อย เพราะนี่อาจจะเป็นจุดเปลี่ยนในกการ Survey, Inspection, Reverse Engineer ของเราเลยก็ได้
- SLAM คืออะไร? Handheld Lidear Scan คืออะไร?
- ในกล่อง SLAM100 มีอะไรบ้าง? หน้าตาเครื่องเป็นอย่างไง?
- Mode การใช้งาน SLAM100 มีอะไรบ้าง?
- ขั้นตอนการใช้งาน 2 ขั้นตอน
- SLAM GO (เดินสแกน ผ่าน App มือถือ)
- SLAM POST (process ข้อมูลด้วยคอมพิวเตอร์)
- ประโยชน์และการนำ SLAM ไปใช้ 7ประเภท
- สรุป ข้อดีข้อเสีย SLAM100
- แถมการใช้งาน ReCap , Revit เพื่องานสถาปัตยกรรม สร้าง Floor Plan, 3D BIM
SLAM คืออะไร?
สแลม หรือ SLAM ย่อมาจาก Simultaneous Localization and Mapping แปลตรงตัวได้ว่า “ระบบการสร้างแผนที่และระบุตำแหน่งไปพร้อมๆกัน”
การทำงานของ SLAM จะเป็นไปในแบบ Realtime โดยเครื่องจะใช้เทคโนโลยีเลเซอร์บอกพิกัด Lidar ยิงเลเซอร์ออกมาหลายแสนครั้งต่อวินาทีเพื่อไปกระทบสภาพแวดล้อมเพื่อระบุตำแหน่งรูปร่างในรูปแบบ 3มิติ x,y,z เจ้าจุดเลเซอร์นับล้านๆจุดนี่เองที่สร้างแผนที่ 3มิติ โดยมากจะเรียกว่า Point Cloud (เลเซอร์ 1จุดที่ยิงไปตกกระทบสภาพแวดล้อมจะระบุพิกัด XYZ เมื่อจะเป็นหลายล้านจุดจะเป็นกลุ่มของจุดขนาดใหญ่ เลยเรียกกลุ่มเมฆของจุด) ตำแหน่งที่ได้ค่อนข้างมีความแม่นยำระดับมิลลิเมตร-เซนติเมตรแล้วแต่รุ่น เราสามารถเอา Point Cloud ไปใช้ประโยชน์ได้มากมาย ทั้งการวัดขนาด พื้นที่ ปริมาตร ในรุปแบบ 3มิติ
ถ้าพูดเป็นภาษาชาวบ้านให้เข้าใจง่ายแล้ว SLAM คือ Lidar 3มิติเคลื่อนที่ได้ หรือ Lidar แบบ handheld นั้นเองเป็นการปฏิวัติการสแกน Lidar จากที่ต้องใช้ขาตั้งกล้องจุดหนึ่งเสร็จ ไปต่ออีกจุดเป็นการทำงานแบบ Realtime จากสแกนเป็นวันๆ จึงเหลือเป็นหลักนาที

Spec SLAM100 ในกล่องมีอะไรบ้าง?
SLAM100 ออกมาทำตลาดแข่งกับผู้ผลิตยุโรปอย่าง Leica และ GeoSLAM ของอังกฤษ (ปัจจุบัน GeoSLAM เป็นส่วนหนึ่งของ FARO) โดยเครื่องมีส่วนประกอบคือส่วนจับถือ Grip, กล้องรอบ 3ตัว, และ โมดูล Lidar ที่หมุนรอบ 2แกน คือ 270°x360° สเปคหลักๆเลยจัดมาให้ไม่แพ้คู่แข่งแต่ราคาถูกกว่ามาก (คู่แข่งราคา 2ล้าน+ )
- 270°x360°rotating เลเซอร์อ่านค่า 270°รอบตัวมัน และหัวหมุน 360° รอบตัวเอง
- 360,000 Points/Sec – Laser 16Channel – up to 120m range
- แบตเตอรี่เป็น Lithium 18650 จำนวน 4 ก้อนที่หาซื้อได้ทั่วไป เป็นมิตรกับผู้ใช้
- ไม่ต้องเสียค่า Subsription รายปี


Mode การใช้งาน SLAM มีอะไรบ้าง?
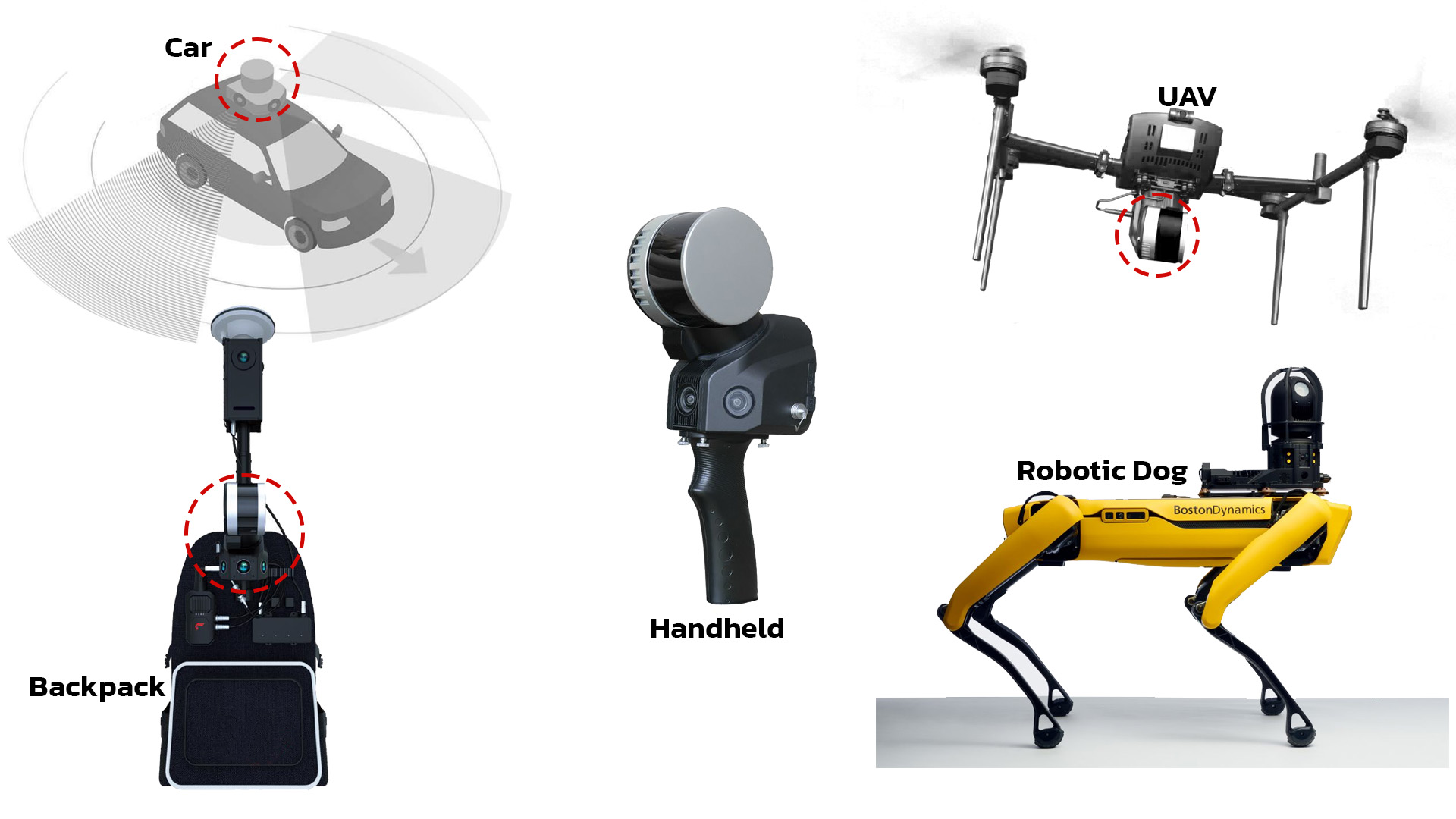
SLAM100 ออกแบบมาให้ใช้งานได้หลายโหมดครับ โดยโหมดหลักเบสิกที่สุดคือการถือสแกน และมี โหมกการสแกนแบบ Backpack, Car or Robot Mode, UAV Mode
- Handheld Mode – จับเครื่องถือสแกน
- Backpack Mode – กรณ๊สแกนเป็นพื้นที่ใหญ่ มีขายชุดเป้สะพายแยก
- Car or Robot Mode – สามารถติดรถยนต์ หรือ สุนัขหุ่นยนต์สแกน ในพื้นที่ต่างๆได้
- UAV Mode – ติดกับอากาศยานไร้คนขับ เพื่อการสแกนทางอากาศ
ขั้นตอบการทำงาน
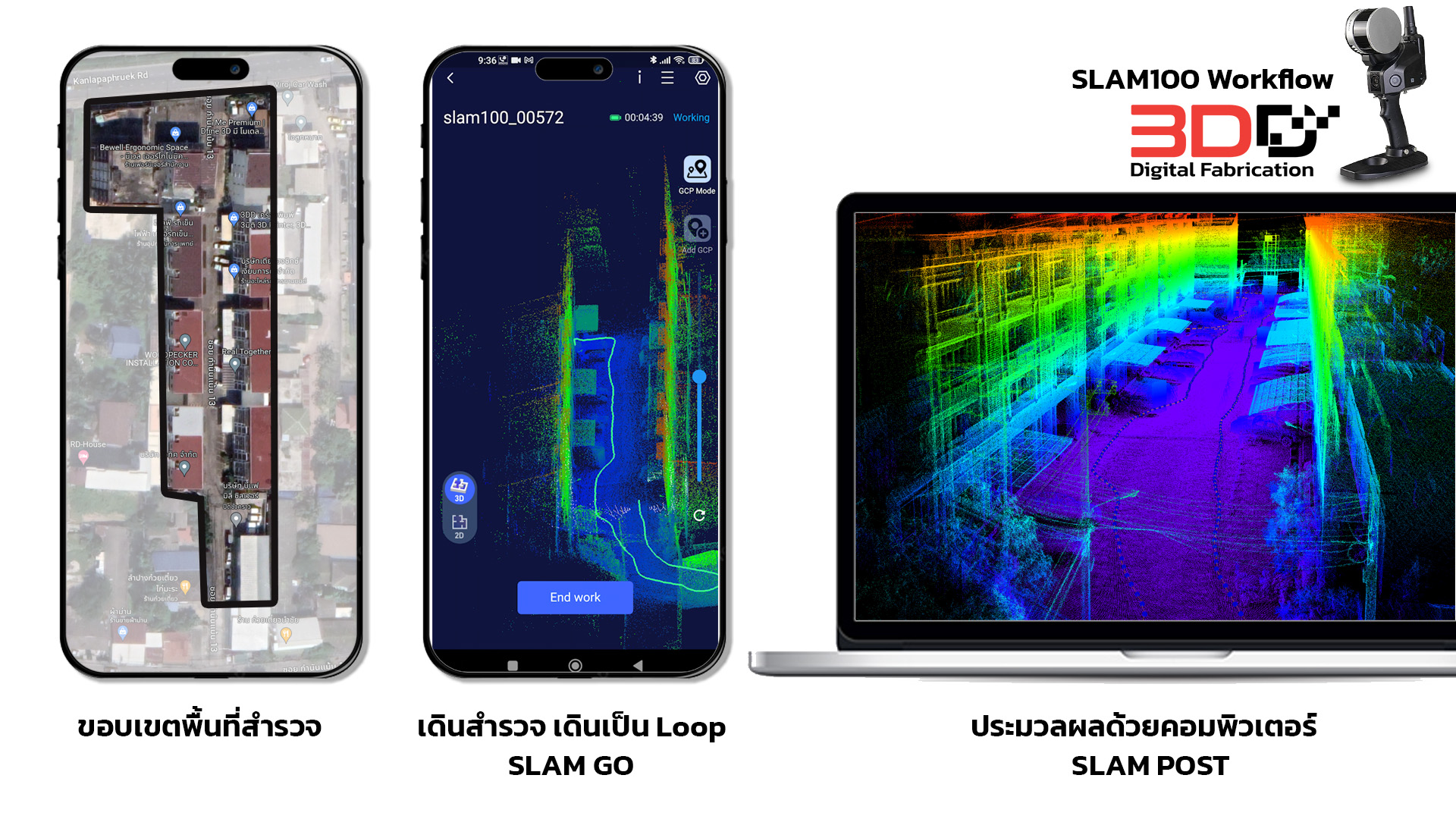
ขั้นตอนการทำงาน Workflow Process สามารถแยกเป็นสองส่วนคือ ขั้นตอนการสแกน (Scan) และ ขั้นตอนนำไฟล์สแกนไปประมวลผล (Post Scan) โดย Software ของ SLAM100 คือ SLAM GO และ SLAM POST ตามลำดับ
- SLAM GO สแกน Onsite หน้างานผ่านมือถือ ประมาณ 5-30นาที (ตามความใหญ่ของสถานที่)
- SLAM POST นำไฟล์ที่ได้มา Process ด้วย PC อีกทีหนึ่งเพื่อให้ได้ข้อมูลที่แม่นยำ และ ละเอียดมากขึ้น
SLAM GO (App)
เป็น App ในมือถือ Android หรือ iOS เอาไว้เชื่อมต่อ สั่งการทำงานและดูการสร้างแผนที่ 3มิติ 3D Mapping ที่ได้แบบ Realtime การทำงานอาจจะแบ่งได้ดังนี้
- เชื่อมต่อเครื่อง SLAM100 ด้วย Wifi หรือ NFC (ในตัวอย่างจะเชื่อมต่อด้วย Wifi)
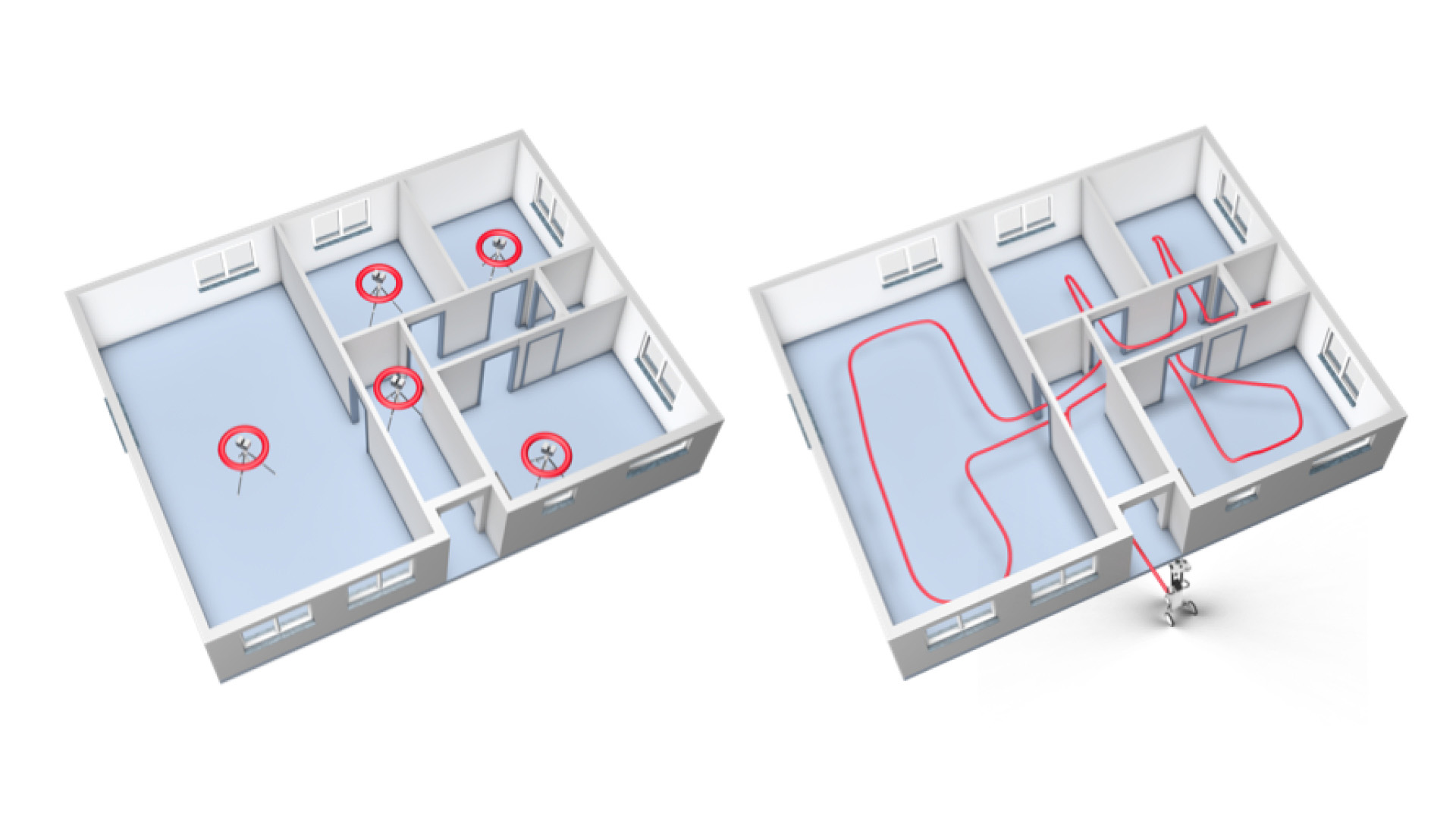
- ทำการสแกน โดยหลักการสแกน ให้สแกนเป็น Loop – อย่าเลี้ยวหักมุม
- สแกนให้เป็น Loop เดินเป็นวงให้ครบรอบ จุดแรกการแสกน และ จุดสุดท้ายควรเป็นสุดเดียวกัน
- สแกนไม่เลี้ยวอย่าหักมุม เวลาเลี้ยวให้ตีวงเลี้ยวกว้างหน่อย Point Cloud ที่ไ้ด้จะต่อกันได้ดีกว่า ไฟล์ 3D ที่ได้จะมีคุณภาพมากกว่า
- สแกนช้า ก้าวอย่างสม่ำเสมอ มือเครื่อง SLAM100 นิ่งๆ คล้ายๆกับ Grip ปืนใช้สองมือประคอง เดินอย่างสม่ำเสมอ
- ดูที่จอมือถือเราว่า สแกนไปถึงไหนแล้วโดย App จะโชว์ตำแหน่งปัจจุบันของเรา และเส้นทางที่เราเดินผ่านมา
- ใน App จะขึ้น Point Cloud แผ่นที่ 3มิติ, ตำแหน่งปัจจุบัน, เส้นทางที่เดินผ่านมา แบบ Real Time
- ดูการแสดงผลได้ทั้งแบบ 2D และ 3D
- ในตัวอย่างเราสแกน หมู่บ้านที่มีทั้งหมด 26หลัง ขนาดพื้นที่ 4ไร่ ใช้เวลาสแกน 12นาที

SLAM POST (PC Software)
หลังจากสแกนนอกสถานที่แล้วกลับ มาที่ Office เราสามารถถอด SD Card ที่อยู่ที่ตัว SLAM ออกมาเพื่อ Process ในคอมพิวเตอร์ Software ที่ใช้คือ SLAM Pro จะเอา Raw Data ที่ได้จากการสแกน Point Cloud และ รูปถ่ายจากกล้อง 3ตัว มาประมวลผลด้วยคอมพิวเตอร์อีกครั้ง อันนี้เข้าใจได้เพราะไฟล์ใหญ่เป็น GB มือถือไม่สามารถรันงานใหญ่มากๆขนาดนี้ได้จึงต้องใช้คอมพิวเตอร์ โดยฟังก์ชั่นหลักอาจจะสรุปได้ดังนี้ (เราจะไปลงลึกในส่วนของบทความต่อๆไป)
- ไฟล์ที่ได้จาก SLAM GO เอามาประมวลผลต่อด้วย Software SLAM POST โดยใช้พลังงานของคอมพิวเตอร์ในการประมวลผลต่อ
- ไฟล์ที่ได้อาจจะมีขนาดตั้งแต่ 1GB ถึง 10GB แล้วแต่ความใหญ่ของงานสแกน
- Software จะประมวลผล Point Cloud replay ให้เราเห็นเส้นทางการเดินของเรา พร้อมสร้างสีของจุด และ ภาพ Panorama
- ไฟล์ที่ได้สามารถทำได้หลายอย่างตั้งแต่ Elevation, Intensity, Texture, Distance, Panorama และ Route
- Elevation แสดงสีไล่ตั้งแต่พื้นที่ต่ำเป็นพื่นที่สูง
- Intensity แสดงความหนาแน่นของ Point Cloud
- Texture แสดงสีจริงของ จุดบน Point Cloud แต่ละจุด
- Distance เครื่องมือวัดขนาดระหว่างสองจุด เช่น วัดความสูงของเสาไฟฟ้า วัดความห่างของเสาไฟฟ้า เป็นต้น
- Panorama รูปภาพ Panorama ที่ถ่าย ณ จุดต่างๆ โดยค่ามาตรฐานจะถ่ายภาพ Panorama ทุกๆ 1วินาที
- Route แสดงเส้นทางเดินที่เดินสำรวจ
จะเห็นว่าไฟล์ Point Cloud ที่ได้นั้นสามารถใช้งานได้ทันที่ในการวัดขนาด โดยสามารถเอาไฟล์ได้ต่อยอดทำอะไรได้หลากหลายมากจะกล่าวในขั้นต่อๆไป


การนำ SLAM100 ไปใช้ และประโยชน์ 7ประเภท
ไฟล์ที่ได้จาก SLAM POST นั้นเป็นไฟล์ 3มิติในรูปแบบ Point Cloud สามารถไปทำต่อได้อีกมากมาย เช่นไปแปลงเป็นโมเดล 3มิติ STL, OBJ หรือเอาทำงานด้านการคำนวนพื้นที่ พื้นผิว ปริมาตร และ งานด้าน Reverse Engineering และ BIM โดยสรุปการนำไปใช้งานหลักๆได้ 7ประเภท
ปล. แต่ละธุรกิจจะใช้ Software แตกต่างกันไปในการนำไปใช้ เช่น Survey Architecture ใช้ของ Autodesk Revit, Reverse Engineer อาจจะ Geomagic Design X ,สืบเรื่องคดีอาชญกรรมอาจจะแค่จิ้มดูวิถีกระสุนด้วย Software ที่แถมมา, VR XR อาจจะไปทำต่อที่ Reality Caprture, Blender, Agisoft เป็นต้น
- Survey & Inspection การสำรวจและการตรวจสอบ สามารถเอา SLAM ไปใช้ได้โดยง่าย เนื่องจากเร็วไม่ต้องปีนไปวัด ได้ค่าทุกตำแหน่งไม่ต้องใช้ทีมงานหลายคน สามารถไปได้คนเดียว เช่น การดูระบบท่อ, ระบบไฟฟ้า งานโครงสร้าง การสำรวจเพื่อต่อเติมในโรงงานอุตสาหกรรม ดูความปลอดภัยของระบบ Renovate โครงสร้างและอื่นๆเป็นต้น
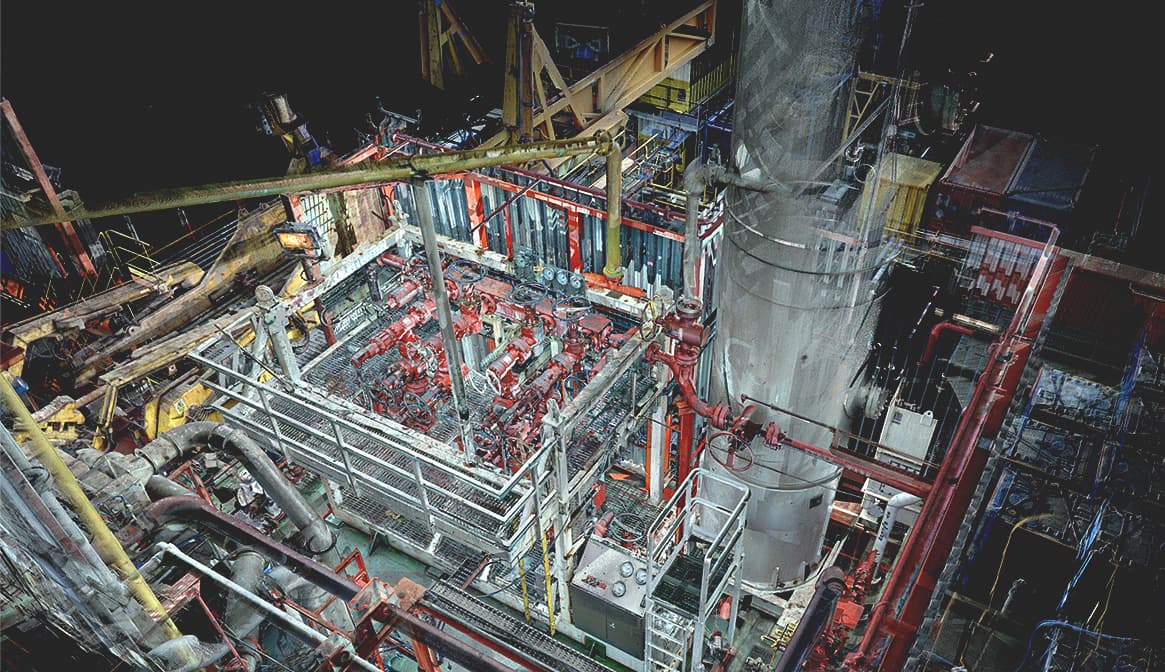
ตย.การใช้ในวงการ Survey และ Inspection โรงงานที่มีการเดินท่อ โครงสร้างอาคารที่ต้องมีการจัดการ ตรวจสอบ หรือแม้กระทั่งตรวจความปลอดภัย - Architecture & BIM การทำ Floorplan งานต่อเติมโครงสร้าง การทำ BIM โดยการแปลงจาก Point Cloud มาเป็น Drawing 2D หรือ 3D Model เพื่องานออกแบบ อนุรักษ์ และ ต่อเติม
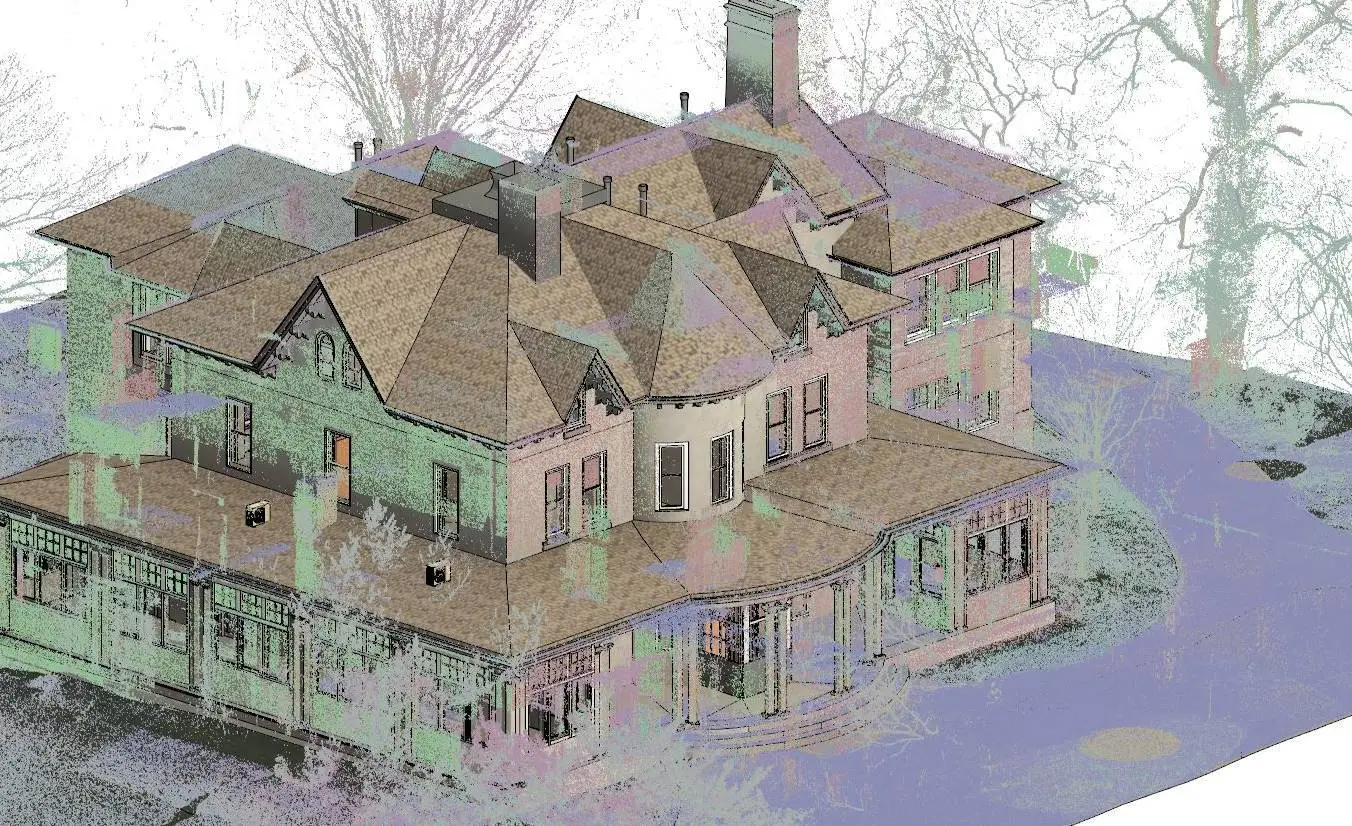
ในไปใช้กับงานสถาปัตย์กรรม การออกแบบอาคาร สร้าง Floorplan หรือ โมเดล 3มิติ - Engineering & Reverse Engineer การทำวิศวกรรมย้อนกลับ ของที่ขนาดใหญ่เป็น รถถัง เครื่องบิน เรือโดยสาร ถังเก็บสารเคมีในโรงงานอุตสาหกรรม หรือ อะไรที่มีขนาดใหญ่ต้องเดินโดยรอบ ตย. เป็น Reverese Engineer เครื่องบินเป็นต้น
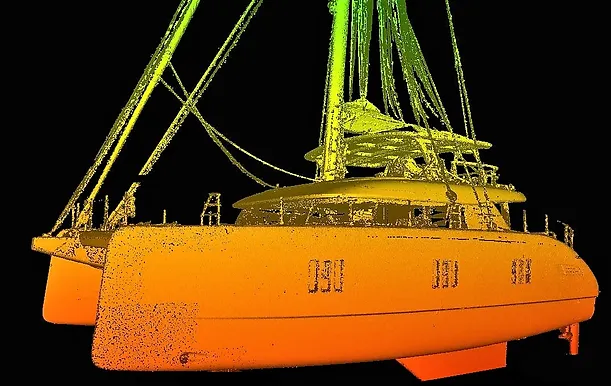
ตย. การทำ Reverse Engineering เรือ เครื่องบิน หรือ รถขนาดใหญ่ - VR XR & Entertainment การสแกนสถานที่จริงเพื่อสร้างประสบการณ์เสมือน สร้างงานภาพยนต์ เกมส์ สื่อบันเทิงต่างๆ ประหยัดเวลาในการทำ และ ใช้คนทำจากเป็นทีมงานหลายคน เหลือทำงานแค่คนเดียวก็ได้ สแกนแยกชิบุย่า เพื่อทำภาพยนต์ CG

ตย. การสร้างหนังโดยการสแกนสถานที่จริง มาสร้าง CG เกมส์ ภาพยนต์ หรือ แม้กระทั่ว VR XR - Forestry Research & Carbon Credit หลังๆจะนำไปใช้มากกับการสำรวจป่า นับจำนวนต้นไม้ ความหนาแน่นของต้นไม้ และ มีกำลังตอนนี้การคำนวน Cabon Credit ที่อนาคตหลายๆบริษัทต้องผู้ผลิตต้องทำการซื้อขายกันแล้ว

ในไปใช้ในเชิง ป่าไม้ การอนุรักษ์ การคำนวน Carbon Credit - Archaeology & Cultual โบราณคดี การอนุรักษ์วัฒนธรรม ใช้ในการสแกนสถานที่โบราณ เพื่อการอนุรักษ์ วัฒนกรรม เก็บ Data เพื่อใช้ในการอ้างอิง หรือใช้ในการบูรณะสถานที่

ใช้ในการอนุรักษ์โบราณ สถาน การเก็บของมูลเพื่อการวิจัย หรือวางแผนการบำรุงรักษา - Crime Scene Investigation (CSI) ในประกอบในการหาวัตถุพยานคดี เหตุอาชญกรรมต่างๆ เนื่องจากไฟล์ที่ได้เป็นไฟล์ 3มิติ สามารถคำนวนหาวิถีกระสุนได้แม่นยำกว่า สาเหตุการตายได้แม่นยำกว่า

Crime Scene Investigation CSI การพิสูจน์หลัก เพื่อเป็นประโยชน์ต่อรูปคดีเชิงการยิง วิถีกระสุนเป็นต้น
สรุป ข้อดี ข้อสังเกตุ
จากที่ทดลองใช้งานมาเป็นสัปดาห์กับ SLAM100 ค่อนข้างประทับใจกับคุณภาพงานสแกน ด้วยราคาที่ต่ำกว่าคู่แข่งเป็นเท่าตัว GO SLAM ราคา 2ล้าน ส่วน Leica 2Go ราคา 2ล้านกว่าบาทเช่นกัน SLAM100 ทำราคาเครื่อง SLAM ออกมาให้จับต้องได้ที่ 700-800K เชื่อว่าต่อไปน่าจะได้เห็นคนไทยได้ใช้อยู่หลายๆแห่ง แม้ความแม่นยำจะได้ละเอียดเหมือนเครื่อง Lidar Scan แบบขาตั้ง Station แต่ได้มาซึ่งความเร็ว คือเร็วกว่ามากๆการสแกนโครงการหมู่บ้านจากต้องใช้เวลาสแกน 1วัน เหลือใช้เวลาเพียงแค่ 12นาที
เครื่องนี้จึงเหมาะสำหรับ ธุรกิจที่ต้องสแกนบ่อยๆ สแกนสถานที่ใหญ่ ต้องการประหยัดเวลา ใช้คนทำงานเพียงแค่คนเดียว งานสแกนแบบปุ๊บๆเดินทีเดียวเสร็จเลย คาดหวังกับความละเอียด 0.5-1 cm ผิดพลาดได้เป็นหน่วยมิลลิเมตร-เซนติเมตร ถ้าคาดหวังหน่วยไมครอนเครื่อง SLAM ไม่ตอบโจทย์สำหรับคุณครับ แต่เท่าที่ลองตัวนี้เป็นการปฏิวัติวงการ Lidar Scan จริงๆ
ข้อดี
- ราคาจับต้องได้ 7-8แสน เทียบกับเจ้าตลาดอย่าง GeoSLAM, Leica2Go ที่ขายกันที่ 2ล้าน
- สแกนได้เร็วมากๆ จากที่สแกนโครงการหนึ่งๆใช้เวลาทั้งวัน ตัวนี้ใช้เวลาเหลือแค่ 12นาที
- Software ซื้อขาดไม่ต้องมาต่อ Subcription โดนไถ่เงินกันทุกปี
- เอาไฟล์ไปต่อยอดงานได้หลากหลายมากๆ
ข้อสังเกตุ
- หนักไปต้องถือสองมือ ให้ผู้หญิงถือสแกนนานๆไม่ได้เลยครับ ผู้ชายยังสแกน 12นาทียังเมื่อย แนะว่าไปติด Backpack สะพายหลังเดินสแกนไปเรื่อยๆน่าจะดีกว่า
- Commutiny คนไทยยังใช้กันน้อย น่าจะเนื่องจากราคา SLAM ของเจ้าอื่นที่หลักล้านอยู่ SLAM100 ตัวนี้น่าจะมาเปลี่ยนให้คนไทยใช้กันเยอะขึ้น
แถม!!! การใช้งาน BIM ด้วย ReCap และ Revit
ผมแนนตัวอย่างการเอาไฟล์ Point Cloud ไปใช้งานต่อใน ReCap และ Revit ทำงานในหมวดของ Archetecture, BIM งานโครงสร้าง
- ReCap ทำการจัดการ Point Cloud
- ReVit นำ Point Cloud มาสร้าง Floor Plan หรือ สร้างโครงสร้าง 3มิติ เพื่อใช้ในการออกแบบก่อสร้างต่อๆไป

{kind=link}