{kind=link}
Space Scan Weekly สัปดาห์นี้เป็นครั้งแรงกับการสแกนสถานที่ด้วย SLAM100 เราไปกันที่สวนสาธารณะกัลปพฤกษ์ ที่เลือกสแนกที่นี้เนื่องจากมีสะพานพาดผ่าน สามารถสแกนเก็บตอหม้อ ต้นไม้ และ ส่วนประกอบต่างๆของสถานที่ ต้องการดูพื้นที่สะพานและความต่างระดับ

ขั้นตอนการสแกน
การสแกนสามารถสร้างเป็น Patterm มาตรฐานได้ดังนี้ ก่อนสแกน — วางแผนศึกษาพื้นที่ต้องการสแกน อาจจะจาก Google Maps ขณะสแกน — เดินให้ครบ Loop เริ่มและจบด้วยจุดเดียวกัน เดินเป็นวงกี่ Loop ก็ได้แต่ขอให้เริ่มกับจบจุดเดียวกัน หลังสแกน — นำไฟล์ที่ได้มาประมวลด้วย PC จะได้ Point Cloud ที่ละเอียดแม่นยำมากขึ้น
Pre-Scan วางแผนงานสแกน
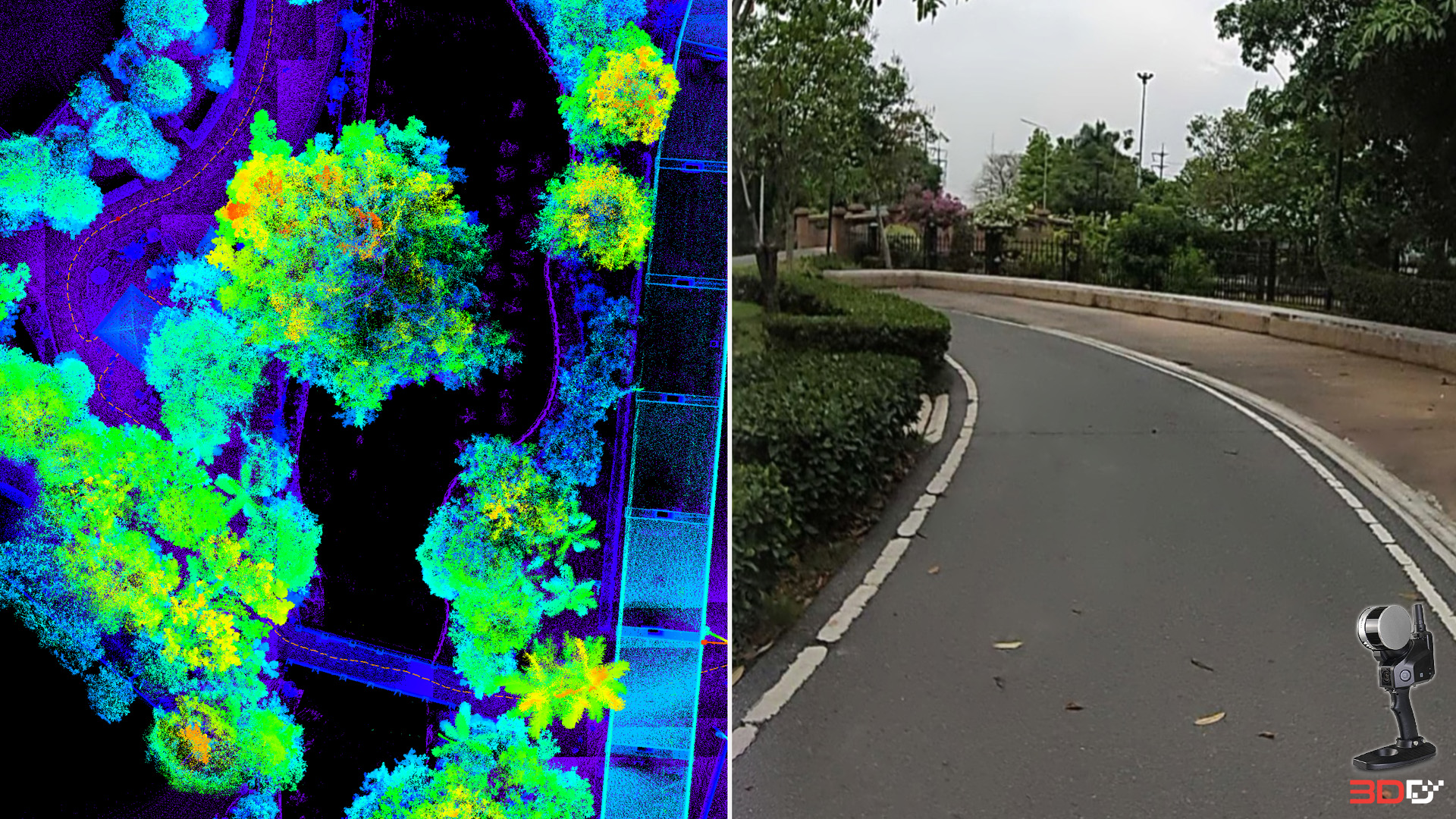
เราได้โจทย์จากลูกค้าที่ทำงานก่อสร้าง และ Survey มาคือสแกนเก็บพื้นที่มีต้นไม้ และ ทางต่างระดับให้หน่อย จะดูระยะการสแกนและความเร็วในการสแกน เราเลือกสวนกัลปพฤกษ์ เพราะว่าตอบโจทย์ส่วนที่ลค.ต้องการ ตัวเป้าเป็นการเดิน เป็น Loop การเดินคล้ายเลข 8
เราเปิด Google Map ก่อนเลือกเพื่อศึกษาหน้างานว่าควรจะต้องเดินอย่างไง ส่วนไหนสำคับอาจจะเดินซ้อนทับหลายครั้งหน่อย (ติดเดินซ้อนทับ ไฟล์ที่ได้ช่วงนั้นๆจะยิ่งละเอียดและ มี Point Cloud ในการทำงานมากขึ้น)

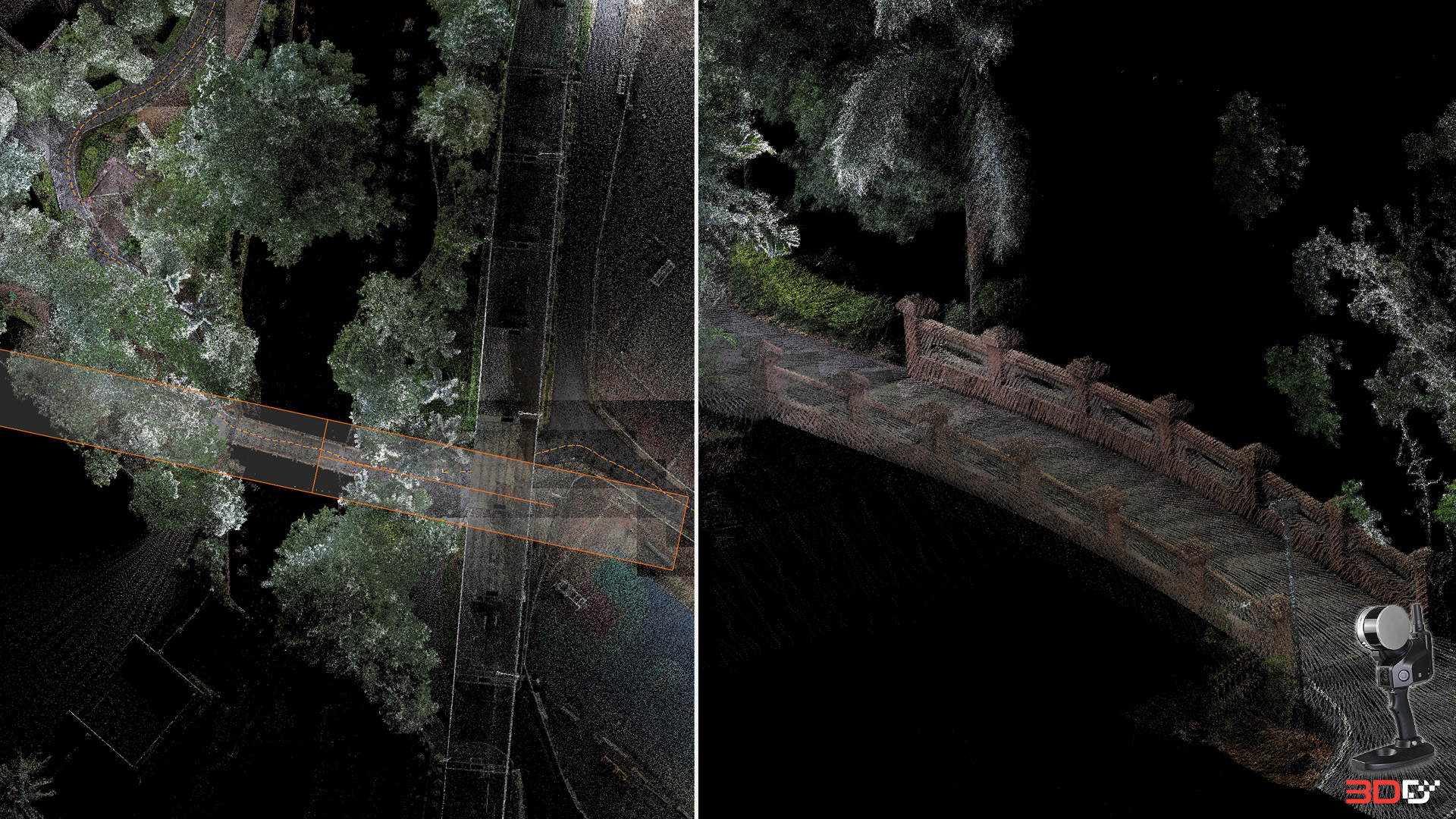
Scan เดินรวดเดียวจบ ด้วย SLAM100
เราเริ่มต้นการสแกนตามแผน แสงวันนี้ไม่ค่อยสวย ฟ้าเป็นมีขาวเพราะมีเมฆเยอะ เราเลือกจุดเริ่มและจุดสุดท้ายอยู่ตำแหน่งใต้ตอหม้อพอดี (เป็นส่วนที่เน้นอยากสแกนมากที่สุด)

พอดีเวลาที่เราไปนั้นเกือบเที่ยงแล้วสวนไม่ค่อยมีคน เราสแกนได้รวดเดียวจบไม่ต้องหยุดรอให้คนเดินผ่าน หรือ หยุดรอรถ อันนี้ถือว่าโชค แต่หากมีคนหรือรถเยอะมาก อาจจะใช้เวลามากกว่าสัก 10-15%


Post-Scan นำข้อมูลการประมวลผลด้วย PC
เราเอาข้อมูลที่ได้จากการสแกนมาประมวลผลอีกทีด้วยคอมพิวเตอร์ ใช้เวลาประมาณ 10นาทีได้ผลลัพธ์ออกมา
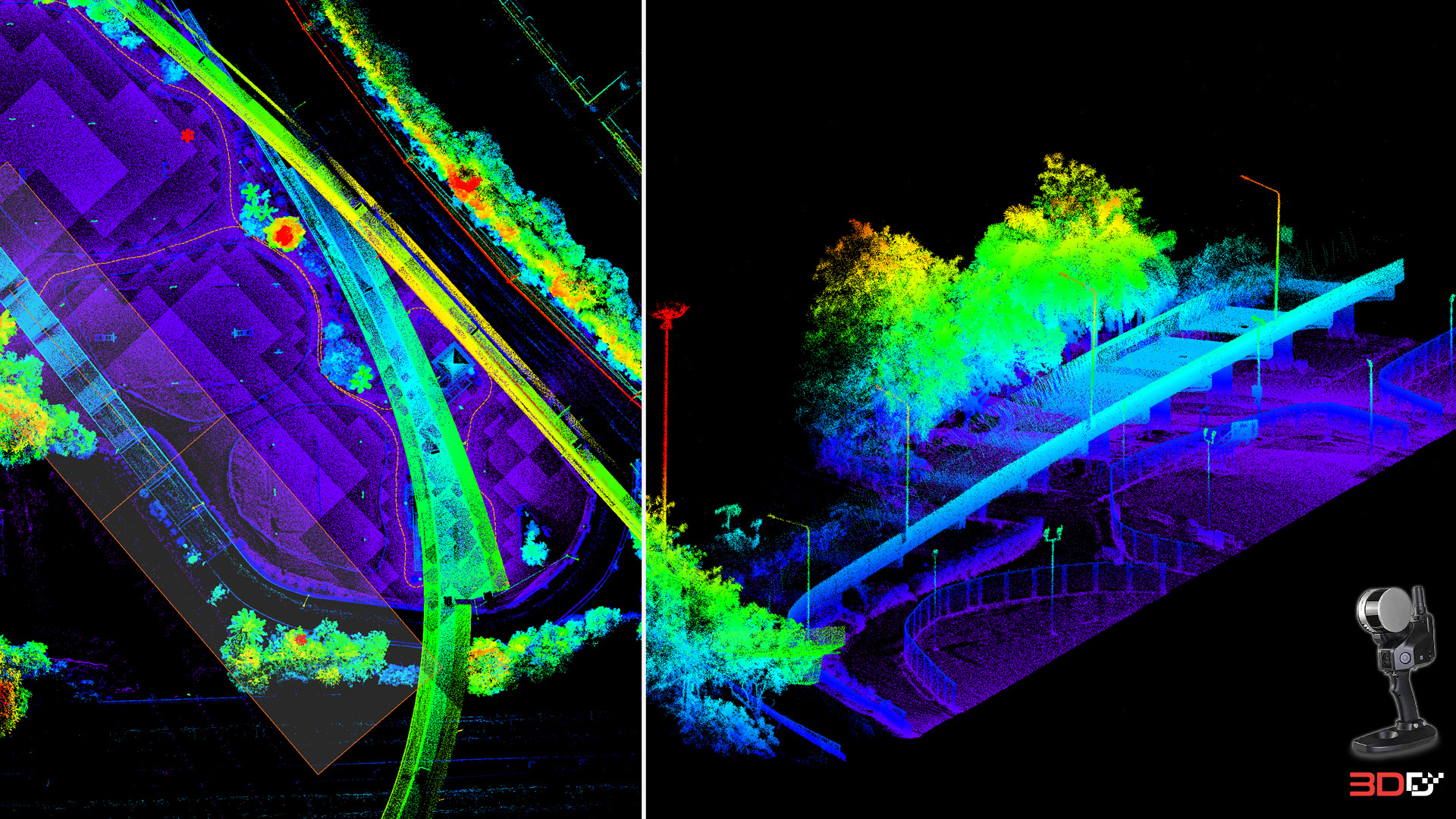
Result ผลลัพธ์ที่ได้
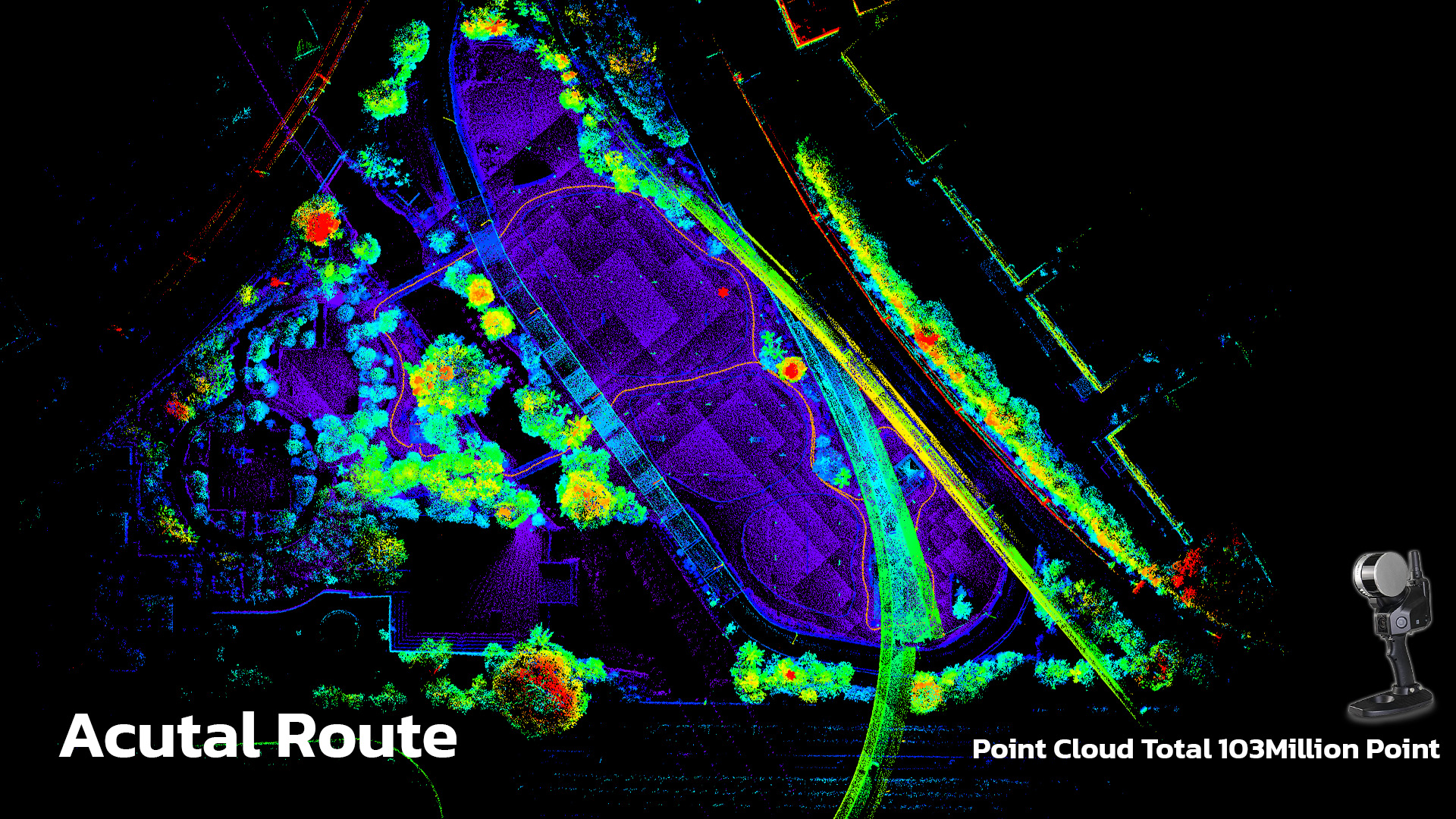
- งานสแกนที่ได้ มีจำนวน Point Cloud 103ล้านจุด
- กินพื้นที่ประมาณ 5ไร่
- ใช้เวลาในการสแกน 12นาที
- เก็บส่วนโครงสร้างได้ทั้งใต้สะพาน และ อาคารในสวนสาธารณะ
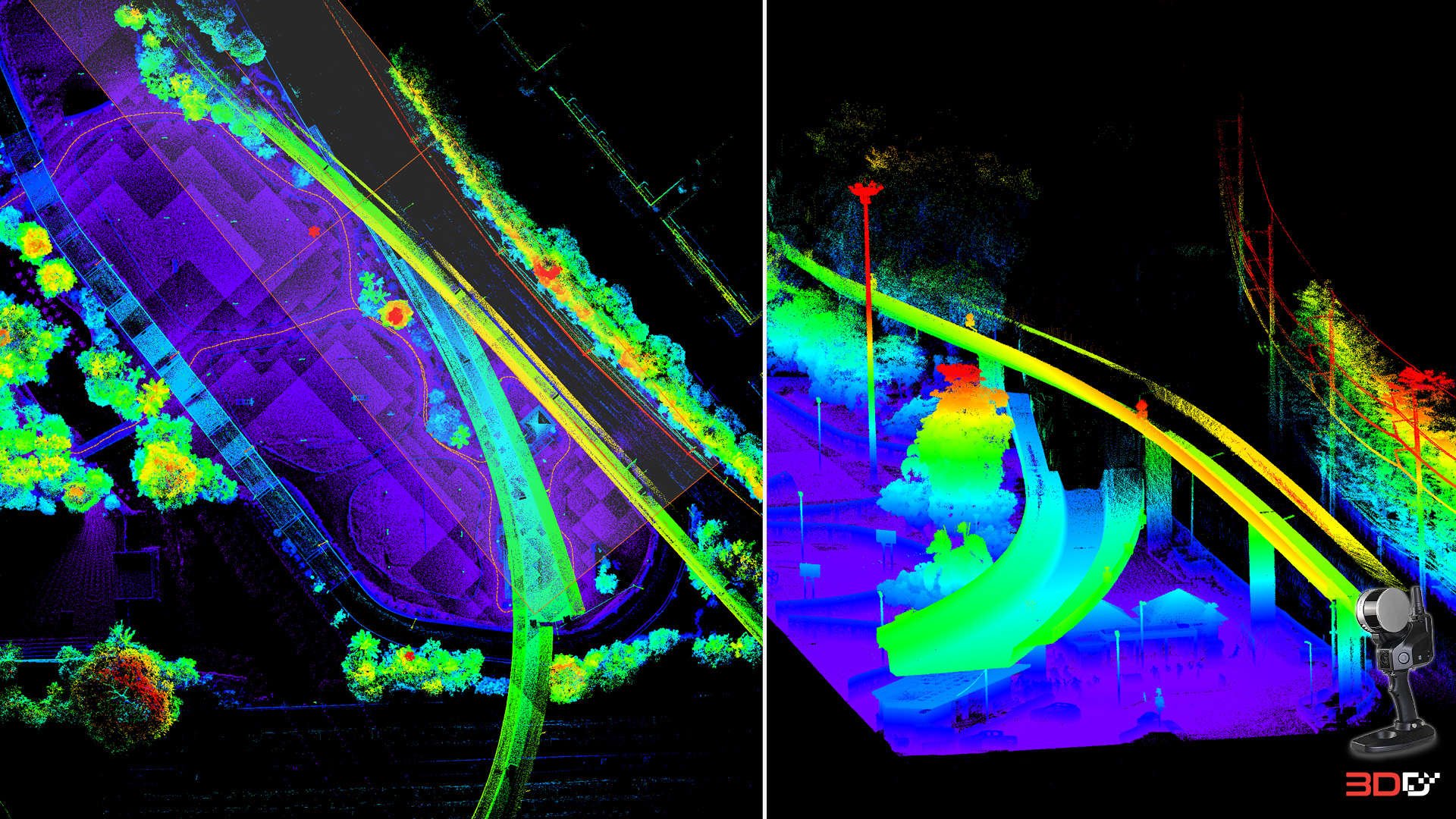
- ไฟล์ 3มิติที่ได้มาสามารถนำไปทำต่อ ได้อีกมากมาย เช่น Revit, Geomagic, Agisoft Metashape, Unreal, SketchUp เป็นต้
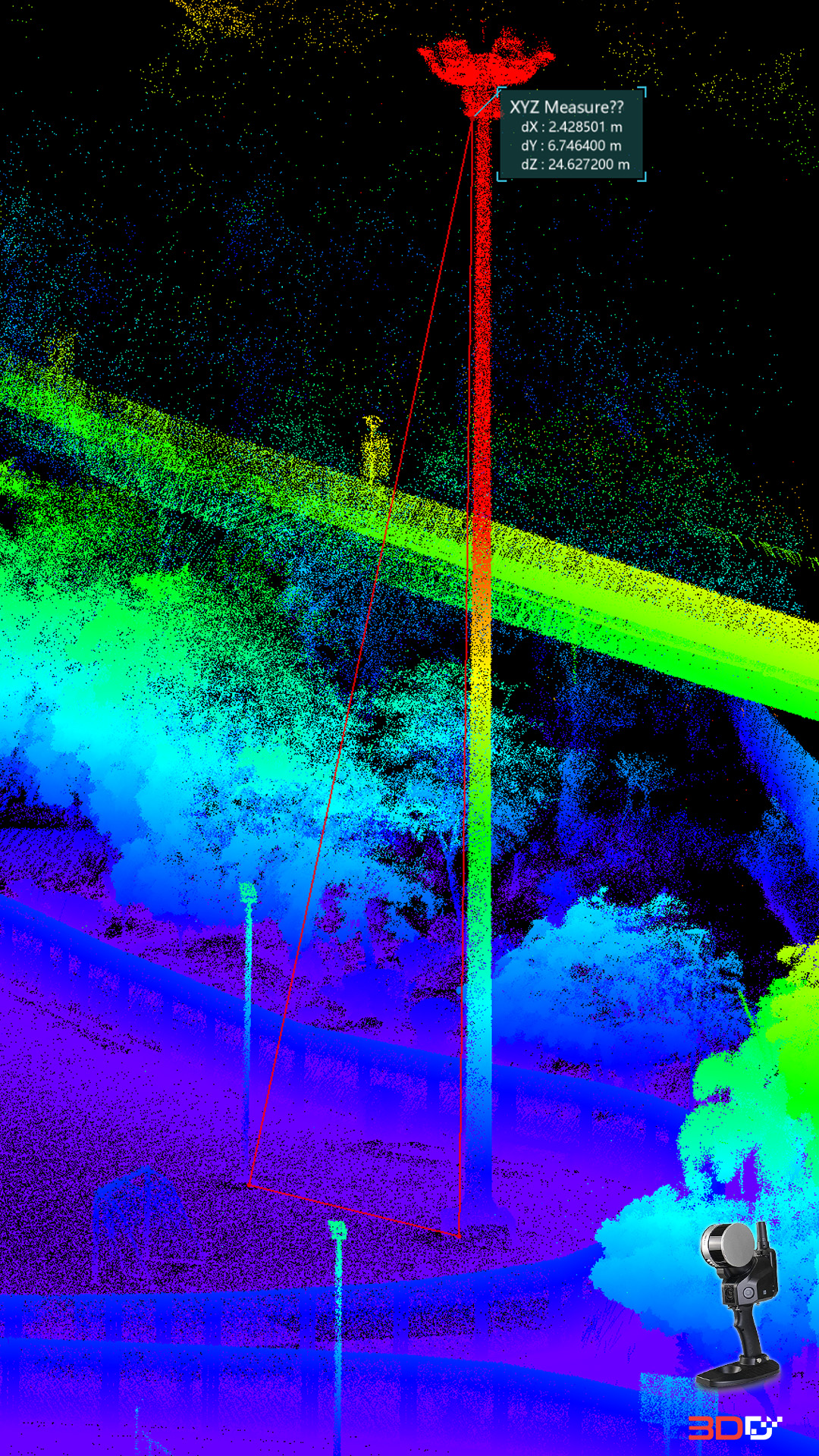
- ถ้าจะใช้แค่วัดขนาดสามารถทำได้ที่ Software ที่ให้มากับเครื่องเลย
- ตย. วัดความสูงของเสาไฟส่องสว่างได้ 24.627200เมตร
-
 Hot360TourLidar
Hot360TourLidarGALOIS M2 [RealSee] 3D Professional LiDAR Camera กล้องเก็บภาพ 3มิติระดับสูง
Original price was: ฿299,000.00.฿249,000.00Current price is: ฿249,000.00. Add to cart -
 HotLidar3D Scanner
HotLidar3D ScannerSLAM100 Handheld Lidar Scanner | Space Capture แบบมือถือระดับโปรเครื่องแรกที่ต่ำกว่าล้าน
฿779,000.00 Add to cart -
 Promotion360Tour
Promotion360Tourบริการสร้างโลกเสมือน Virtual World Package เพิ่มยอดขาย เพิ่มการมองเห็น
เริ่มต้น 8,000 Add to cart -
 Promotion360Tour
Promotion360TourMatterport Pro3 3D Camera For 360Tour
Original price was: ฿279,000.00.฿239,000.00Current price is: ฿239,000.00. Add to cart -
 Promotion360Tour
Promotion360TourMatterport Pro2 (2022 edition) 3D Camera for 360Tour
Original price was: ฿149,000.00.฿99,900.00Current price is: ฿99,900.00. Add to cart -
 360Tour
360TourMatterport Axis Gimbal + Tripod สำหรับถ่ายภาพ 360
พร้อมส่ง!!฿4,490.00 Add to cart -
 360TourLidar
360TourLidarLeica BLK360 กล้อง Lidar 360 คุณภาพสูงจาก Leica
โปรดสอบถาม Add to cart -
 360TourLidar3D Scanner
360TourLidar3D ScannerLeica BLK2GO Survey Scanner แบบ Handheld ตัวแรกของโลก
โปรดสอบถาม Add to cart